Building up a RISC-V Linux with Buildroot
Introduction
A friend told me about a cool new open-source instruction set architecture called RISC-V (pronounced risk-five). As I wanted to learn more about the architecture, I decided writing an RISC-V emulator would make sense. One of my goals include running a Linux on it, much inspired by Fabrice Bellard’s awesome JSLinux project.
I initially started using the same 32-bit RISC-V Linux image as per Bellard’s technical notes, but I needed to add some of my own code for debugging purposes. As RISC-V is already supported by the official Linux Kernel, and the Buildroot project provides a nice framework for cross-compiling a complete and bootable Linux environment, I used it as a starting point.
What to build
We’ll be building the:
- cross-compiler toolchain to build the rest of the software
- buildroot environment
- bootloader - BBL bootloader, it’s the most simple one I found
- Linux kernel - Used my fork of riscv-linux at emuriscv-linux-4.15
The target platform
emuriscv’s architecture is rv32ima - RV32I is the default integer instruction set, M are the integer multiplication and division instructions and A is the extension for atomic instructions.
As I haven’t implemented the floating point instructions yet, we’ll also be using ilp32 ABI for 32-bit soft-float.
It’s a single core, so the atomic operations have been easy to implement :).
Note on emuriscv binaries
emuriscv can’t handle elf binaries, so we strip the binaries with objcopy to make a raw binary from an elf one:
riscv32-unknown-linux-gnu-objcopy -O binary vmlinux vmlinux.bin
To prepare debug symbols (to correlate in-emulator instruction pointer to the source code) I used objdump:
riscv32-unknown-linux-gnu-objdump -t vmlinux.elf > vmlinux-symbol.s
This step needs be done for bbl and linux kernel.
Cross-compiler toolchain
First thing you need is a compiler toolchain. The official one is called riscv-gnu-toolchain, the documentation is good.
To compile and build riscv-gnu-toolchain for rv32ima you need to:
- clone the repository as per the readme
- install the prerequisities as per the readme
- build the cross-compiler
./configure --prefix=/opt/riscv32 --with-arch=rv32ima --with-abi=ilp32make newlibmake linux
- place the newly built tools on path (I decided for
/opt/riscv32):PATH=/opt/riscv32/bin:$PATH
- define the RISCV variable to point at the toolchain
export RISCV=/opt/riscv32
Buildroot
Buildroot provides us with a complete embedded linux “distribution”. We need to build against the rv32ima architecture.
I needed a buildroot that’s able to compile against 4.15 kernel, used buildroot-riscv-2018-10-20, obtained from Bellard’s buildroot notes.
!!!! TODO elaborate on the configuration !!!!
I went for no extra packages, busybox should be enough for the time being.
File system without supporting storage devices
To not have to deal with a file system, devices and file system drivers, there is a neat option to generate a ramdisk filesystem image (initramfs) and then include that into the kernel binary image.
There is an option of using uncompressed or compressed file system image. The minimal-ish buildroot initramfs ended up being 16 MB in size, compared to a gzipped version at 5.3 MB.
Decompressing with a debug build of emuriscv took much longer (minutes) than just loading the bigger uncompressed image, so the uncompressed image is faster for debugging. The differences with a release build are much smaller, as the decompression runs relatively quickly.
Bootloader
Inspired by JSLinux, I used Berkeley Boot Loader (bbl), which is a supervisor execution environment, designed to host the RISC-V Linux port.
It’s hosted in the riscv-pk repository.
Build instructions:
git clone https://github.com/riscv/riscv-pk
cd riscv-pk
mkdir build
cd build
../configure --prefix=$RISCV --host=riscv32-unknown-elf
make
make install
riscv32-unknown-linux-gnu-objcopy -O binary bbl bbl.bin
After making a raw binary as described above, we end up with bbl.bin as our target artifact.
Kernel
I have used riscv-linux @ 4.15 as my starting point. My changes are collected in the fork of riscv-linux
Kernel build configuration
Setting up the kernel options for as simple as possible - everything off, network support, security, most of the devices as well.
The most important being platform selection to even start the boot process:
Base ISA: RV32I, no compressed instrictions, no SMP, no FPU support. Networking support can also be off.
The important devices were:
- RISC-V SBI console support (in Device drivers->Character devices)
- SiFive Platform-Level Interrupt Controller
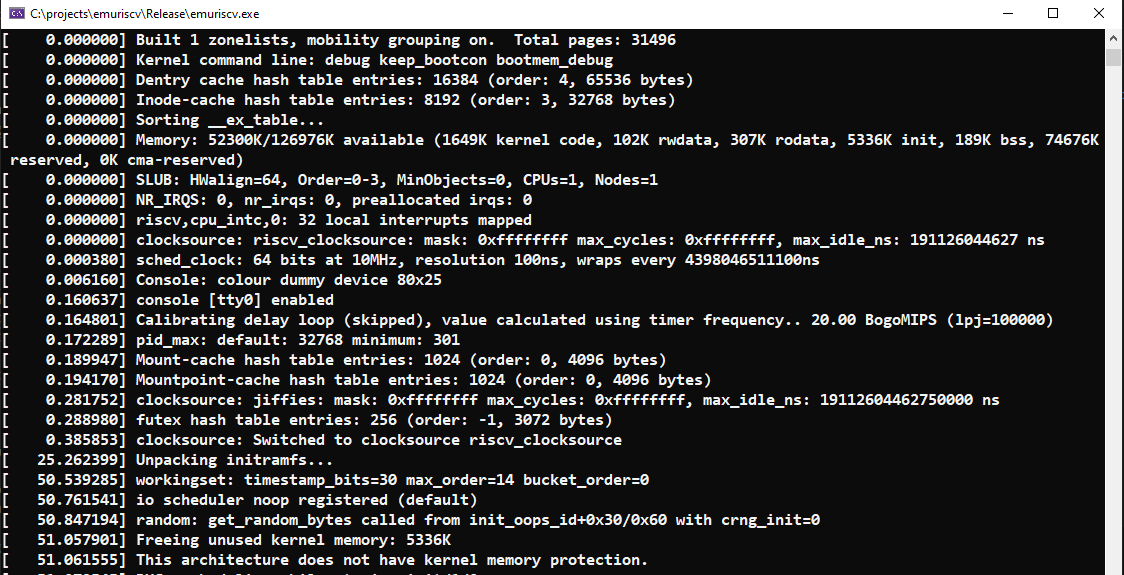
A nice-to-have for diagnosing the boot process is enabling “Show timing information on printks”, “Enable dynamic printk() support”, and setting the highest log levels in the “printk and dmesg options” section.
Also don’t forget to check “early printk” option for writing the kernel log output to our “serial device” (using SBI ecalls).
Including the buildroot initramfs filesystem is done via the General setup -> Initial RAM filesystem and RAM disk support - point to a rootfs.cpio or rootfs.cpio.gz file system image built by buildroot in its output/images folder.
Required patches
The RISC-V SBI console is set up as a boot console, which should be used for early boot only and will get deactivated after the virtual memory system is initialized due to where it’s loaded in the “initial data” memory. Removing the CON_BOOT flag and the __initdata modifier loads it into the memory in a way that it persists as an early and “later” console.
Build instructions
- clone the repository
- set up environment variables
export RISCV=/opt/riscv32export PATH=$PATH:$RISCV/binexport CCPREFIX=riscv32-unknown-linux-gnu-
- prepare the kernel configuration
make ARCH=riscv CROSS_COMPILE=$CCPREFIX defconfigmake ARCH=riscv CROSS_COMPILE=$CCPREFIX nconfig
- build
make ARCH=riscv CROSS_COMPILE=$CCPREFIX vmlinux
Post-build tasks
Make raw binary and debug symbols with:
riscv32-unknown-linux-gnu-objcopy -O binary vmlinux vmlinux.bin
riscv32-unknown-linux-gnu-objdump -t vmlinux.elf > vmlinux-symbol.s
Loading the binaries and booting
BBL is loaded at the address 0x80000000. The CPU starts executing code at 0x1000. We place the flattened device tree (FDT) at 0x1040. Kernel usually ends up loaded at 0x00400000.
We place the following bits of machine code at 0x100:
# $jump_addr = 0x80000000;
# $dtb is the device tree base = 0x1040
# mhartid is 0 as
auipc t0, $jump_addr
auipc a1, $dtb
addi a1, a1, $dtb
csrr a0, mhartid
jalr zero, t0, $jump_addr
Then BBL proceeds on to set up the supervisor mode and goes on to start the Linux boot process.
I’ve used the following command line (bootargs) options:
debug keep_bootcon bootmem_debug